惯性传感器的性能直接决定惯性导航系统的精度。基于原子体系的量子惯性传感器有望在更小体积和更低成本下达到传统惯性传感器的性能,且理论上可以获得比现有技术更高的测量灵敏度和长期稳定性。近些年随着量子精密测量领域的快速发展,量子惯性传感器的实用化和工程化方面研究进展显著,未来通过替代传统加速度计和陀螺仪,有可能形成高度集成、低功耗和低漂移的量子惯性导航系统。
据麦姆斯咨询报道,针对该领域研究,湖南高地光电科技发展有限公司、国防科技大学前沿交叉学科学院、量子信息机理与技术湖南省重点实验室的研究团队进行了综述分析,简要介绍了基于原子体系的量子惯性传感器的基本原理,总结了以原子干涉陀螺仪、原子自旋陀螺仪、原子干涉加速度计、原子干涉重力仪和重力梯度仪为主的量子惯性传感器研究现状,并对有待解决的关键技术问题进行了梳理和分析,以期为量子惯性传感器的发展提供参考。相关研究内容以“基于原子体系的量子惯性传感器研究现状”为题发表在《仪器仪表学报》期刊上。
基于原子体系的量子惯性传感器主要分为干涉式和自旋式两大类,前者的基本原理类似于光学干涉仪,主要利用原子的物质波干涉来敏感载体的惯性信息,包括原子干涉陀螺仪、原子干涉加速度计、原子干涉重力仪和原子干涉重力梯度仪;后者利用原子核和电子的自旋来敏感转动信息,包括核磁共振陀螺仪、无自旋交换弛豫陀螺仪和金刚石NV色心陀螺仪。
原子干涉式量子惯性传感器研究进展
(1)原子干涉陀螺仪
陀螺仪是惯性导航系统的核心器件,原子干涉陀螺仪也是根据Sagnac效应来测量角速度。尽管理论上原子陀螺仪的灵敏度比光学陀螺仪要高很多,但目前原子干涉陀螺仪的性能指标并不比激光陀螺仪(RLG)和半球谐振陀螺仪(HRG)有很大优势,且还处于实验室样机阶段。原子干涉陀螺仪未来有望适用于战略级潜艇、洲际弹道导弹等场景。
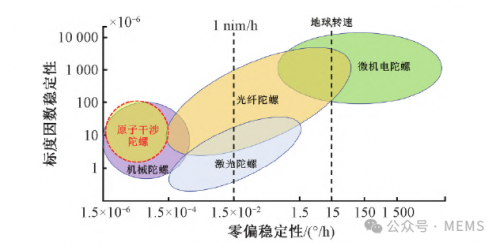
图1 按工作原理划分的陀螺仪零偏稳定性比较
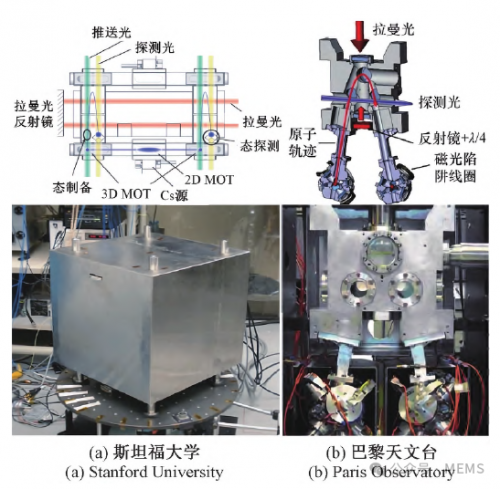
图2 斯坦福大学和巴黎天文台研制的冷原子干涉陀螺仪

图3 中科院精密测量院研制的Mach-Zehnder型原子干涉陀螺仪
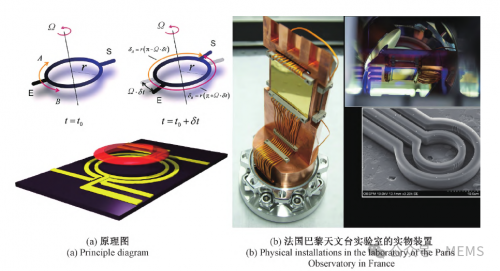
图4 法国巴黎天文台实验室研制的环形导引原子芯片干涉陀螺仪
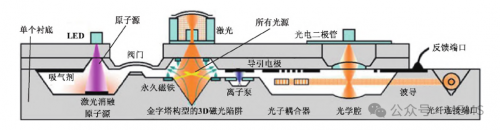
图5 未来高度集成的原子芯片概念图
(2)原子干涉加速度计
原子干涉加速度计同样有长期稳定性好、理论精度高的优点(对重力加速度的测量精度已达10⁻⁹ g量级),但目前和传统加速度计相比,依旧存在动态范围小,体积、质量和功耗大的不足。
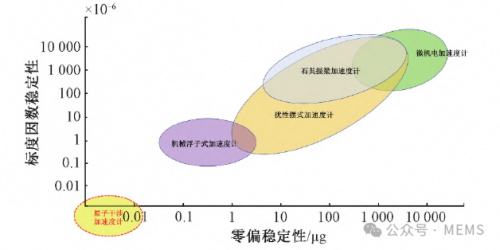
图6 按工作原理划分的加速度计稳定性比较
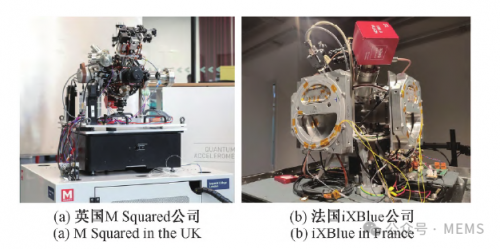
图7 英国M Squared公司和法国iXBlue公司研制的两台紧凑型原子干涉加速度计
(3)原子干涉重力仪和重力梯度仪
实现高精度惯性导航的解决思路之一是利用重力信息进行辅助导航:一是利用高精度的实测重力信息修正惯性导航系统中使用的“模型重力”来提高导航精度,从系统本身角度提高导航定位精度。目前,对重力加速度的静态绝对测量是原子干涉技术最成熟的应用,已经开始商用的原子重力仪产品在测量精度和长期稳定性方面都展现出比传统重力仪更强的性能。二是利用重力场图形匹配技术来限制惯性导航系统误差随时间积累,这种无源重力导航技术,可以提高系统的定位精度,延长系统的重调周期。目前,实现重力梯度测量的技术方案有旋转加速度计方案、静电悬浮方案、超导方案和原子干涉方案。其中,旋转加速度计方案是技术成熟度和可靠性最高的方案。

图8 美国AOSense公司和法国iXblue公司(AQG-B)分别推出的原子重力仪产品

图9 国内部分机构研制的可搬运原子干涉重力仪

图10 加州大学伯克利分校和国防科技大学分别研制的车载原子干涉重力仪
原子自旋式量子惯性传感器研究进展
基于原子自旋体系的原子惯性传感器目前主要应用于陀螺仪,它主要利用原子核和电子的自旋来敏感转动信息。

图11 基于原子自旋的转动测量理论与技术进展
(1)核磁共振陀螺仪
核磁共振陀螺仪是通过检测惰性气体核自旋在静磁场中的拉莫尔进动频率变化来获得转动信息,它具有精度高(理论精度为10⁻⁴°/h)、体积小和成本低的特点。核磁共振陀螺仪没有运动部件,还具有抗振动、大动态和高带宽等特点,能够应用于捷联式惯导系统中。因此,在未来小型化的智能设备和智能军用装备领域,核磁共振陀螺仪会有很好的应用潜力,是当前发展最为成熟的原子陀螺仪,也是实现芯片导航级陀螺仪的重要技术途径之一,受到惯性导航领域的广泛关注。
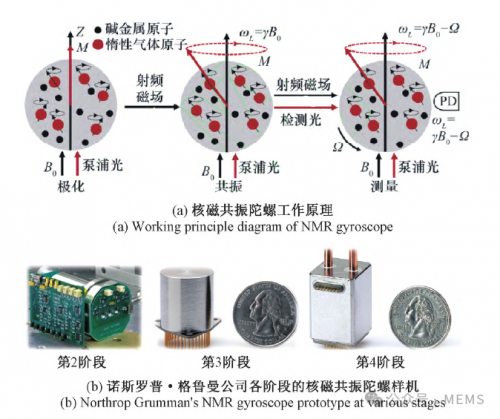
图12 核磁共振陀螺仪工作原理和样机
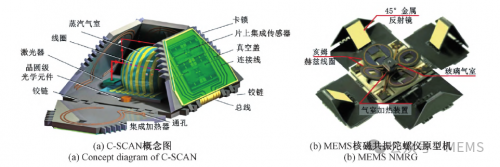
图13 芯片级组合原子导航仪(C-SCAN)概念图和加州大学欧文分校的MEMS核磁共振陀螺仪原型机

图14 北京自动化控制设备研究所核磁共振陀螺仪研究历程
(2)无自旋交换原子陀螺仪
无自旋交换(SERF)原子陀螺仪是基于碱金属原子的电子自旋和惰性气体原子的核自旋检测来实现角速度测量,通过选取碱金属原子的电子自旋角动量(ESAM)和惰性气体原子的原子核自旋角动量(NSAM)构成如图15所示结构。由于电子旋磁比更大,因此SERF陀螺仪的测量精度相较于核磁共振陀螺仪更高,其理论精度可达10⁻⁸°/h,在海陆空天等军事领域有比较大的应用潜力。
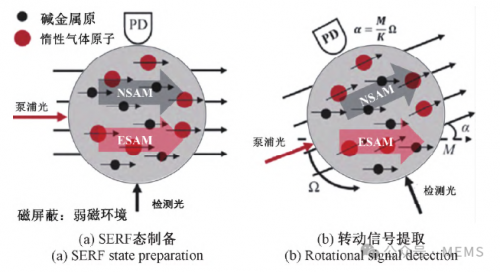
图15 SERF弛豫原子陀螺仪工作原理

图16 普林斯顿大学的第1代和第2代SERF陀螺仪研究平台
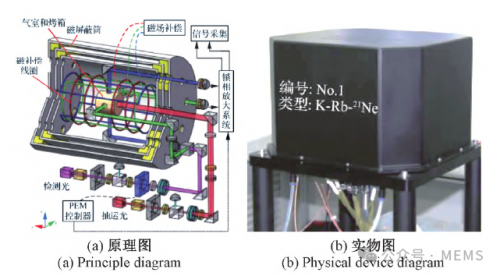
图17 北京航空航天大学第1代SERF陀螺仪
(3)金刚石氮-空位(NV)色心陀螺仪
金刚石NV色心陀螺仪利用惯性转动过程中色心自旋态(包括氮空位中的核自旋或电子自旋)累积的几何相位变化,来敏感惯性参量。金刚石NV色心陀螺仪因其固态自旋密度高和能级结构稳定等特征,不仅具备体积微小、环境适应性强和启动迅速等天然优势,而且能够进行多轴测量。这为研究人员提供了崭新的方向,有望克服原子陀螺仪在集成和小型化方面所面临的技术挑战。
研究总结与展望
基于原子体系的量子惯性传感器有望在更小体积和更低成本下达到传统惯性传感器的性能,且理论上可以获得比现有技术更高的测量灵敏度和长期稳定性,有望开启下一代量子惯性导航时代。然而,该领域研究目前正处于从实验室到现场部署的过渡阶段,依旧面临高成本、尺寸和重量较大、功耗高等一系列问题。不同原理的传感器成熟度相差较大,例如原子干涉重力仪和重力梯度仪已经逐步进入商业化应用。易集成、低功耗和抗振动强的核磁共振陀螺仪目前处于工程样机阶段,集成度最高。而超高精度的原子干涉陀螺仪和SERF陀螺仪还处于实验室样机阶段,金刚石NV色心陀螺仪目前仅有学术研究价值。
展望未来,原子惯性传感器未来的发展趋势依旧是小型化和高精度,通过微纳加工工艺和集成电路制造技术,开发便携式光电集成电路替代原先的空间光学组件,将原子操控装置微型化甚至实现片上集成,从而实现紧凑型、低功耗、高精度和稳定的原子惯性传感器。另外,利用多种惯性传感器进行组合导航,充分利用其不同的优势以提高整体系统性能,也是未来的发展方向之一。此外,量子压缩与纠缠、多光子大动量转移和光晶格囚禁等前沿量子技术的发展和引入有望更进一步提升原子惯性传感器的测量性能并拓宽其应用领域。
论文信息:
DOI: 10.19650/j.cnki.cjsi.J2311513






